Autodiff
NTX keeps the imported solve lane differentiable so transport coefficients can be embedded in inverse problems, sensitivity analysis, and profile workflows.
Inverse Problem Example
The script:
python examples/autodiff_inverse_problem.py
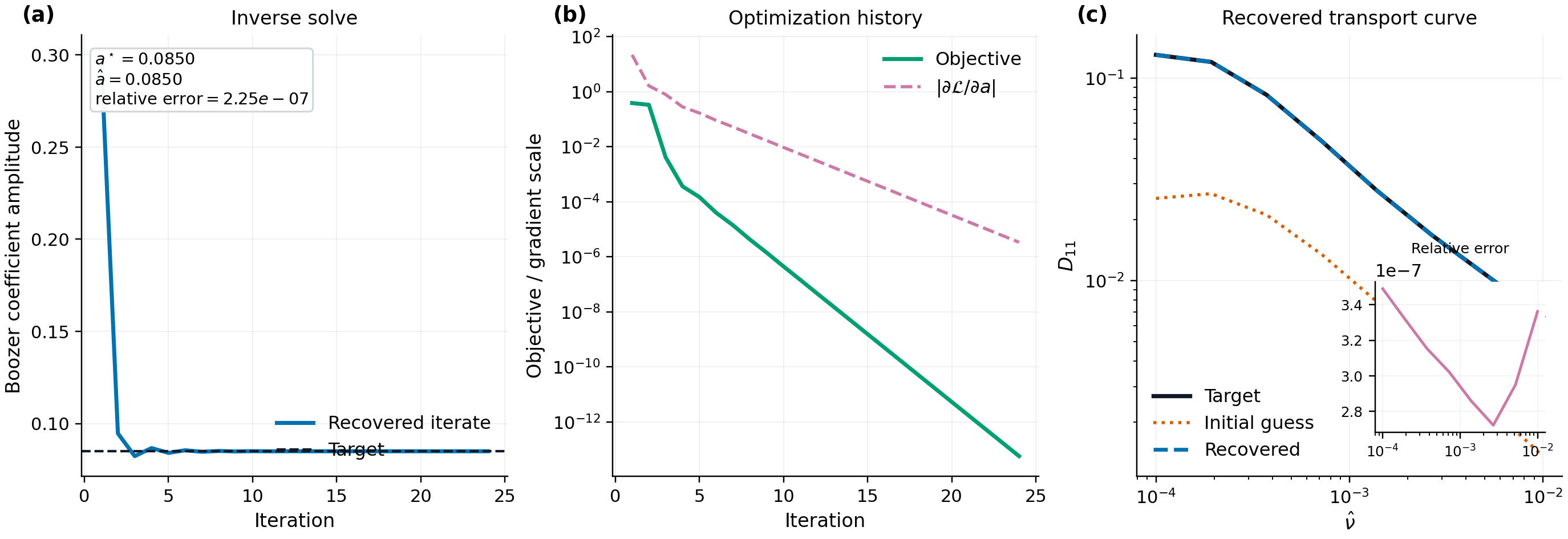
solves a small synthetic inverse problem on the analytic sample surface. One
Fourier amplitude is treated as an unknown parameter, synthetic D11
observations are generated from a target surface, and JAX gradients are used to
recover the amplitude.
The figure is written to:
docs/_static/autodiff_inverse_problem.png
docs/_static/autodiff_inverse_problem.pdf
It shows:
parameter convergence
objective reduction
recovered transport response against the target response
Derivative Audit
The script:
python examples/derivative_audit.py
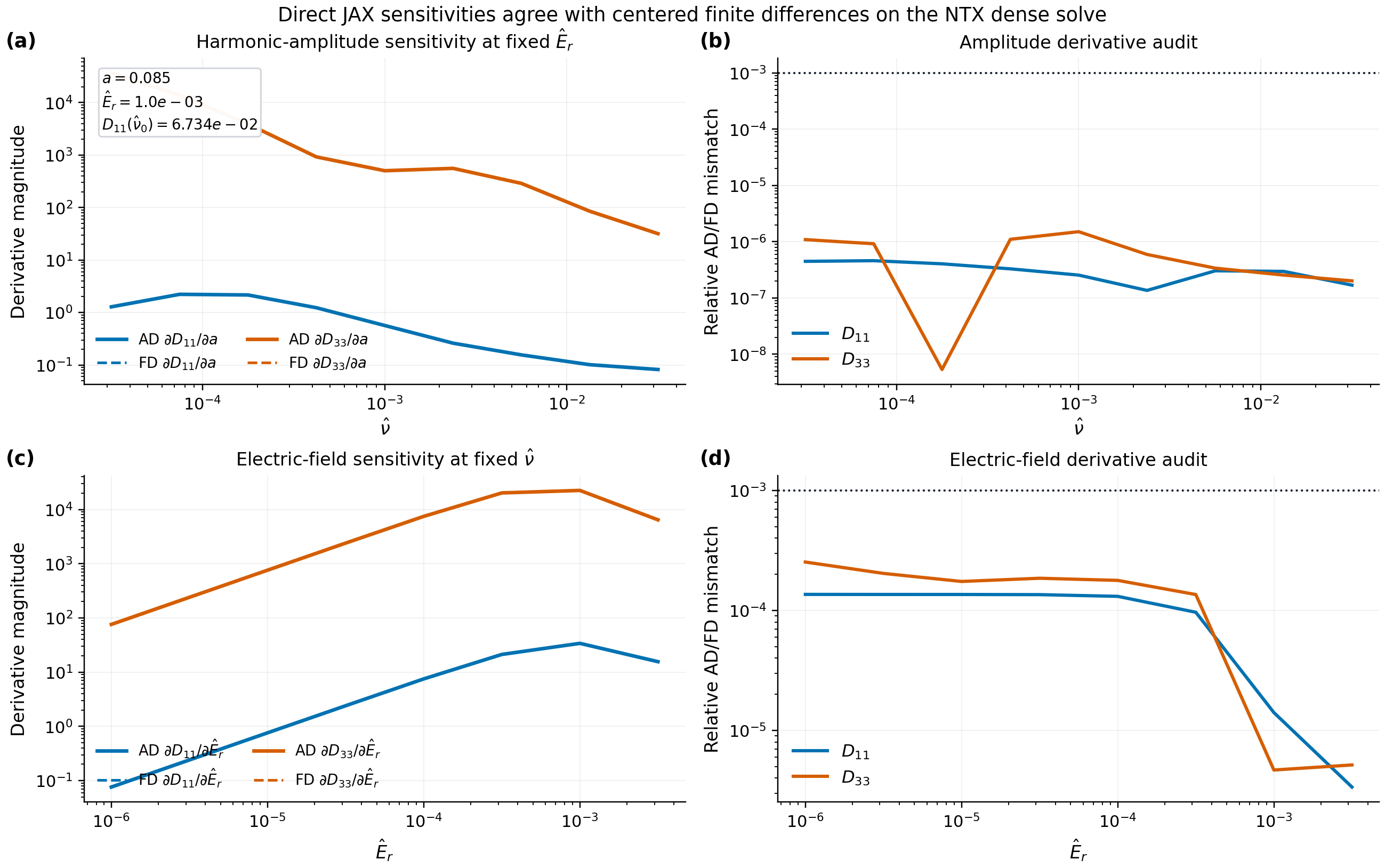
compares direct JAX gradients of the dense monoenergetic solve against centered finite differences for two practically important controls:
a Boozer harmonic amplitude at fixed electric field,
and the radial electric field at fixed collisionality.
The example does not rely on one hidden helper. It walks through the explicit prepared-solver workflow:
from ntx import (
GridSpec,
MonoenergeticCase,
example_surface,
prepare_monoenergetic_system,
solve_prepared_coefficient_vector,
solve_prepared_coefficient_vector_vjp,
)
That is the contract point for the prepared implicit-adjoint derivative path: the forward solve remains the same, while the backward rule stays isolated from user-facing optimization scripts.
The low-level operator derivative used by this path is now test-gated directly:
tests/test_operators.py requires the hand-coded dD_k/dnu_hat and
dD_k/depsi_hat blocks to match JAX differentiation of the assembled
Legendre-space operator. This keeps the collisionality and radial-electric-field
normalizations tied to the implemented equations rather than to a downstream
finite-difference fit.
The figure is written to:
docs/_static/derivative_audit.png
docs/_static/derivative_audit.pdf
It shows:
gradient magnitude across collisionality for
D11andD33,relative mismatch between autodiff and finite differences,
electric-field sensitivities across
\hat E_r,and the current numerical agreement used to validate the prepared implicit-adjoint path.
Prepared-Derivative Benchmark
For a parameter-dependent discrete drift-kinetic system
the tangent equation is
For a scalar coefficient or objective J(f,p), NTX instead reuses the primal
block factors to solve
The transpose action is algebraic: it is reconstructed independently from the conditioned Legendre blocks, including the nullspace row, rather than inferred from agreement with another differentiated program. This follows the standard discrete-adjoint structure used for neoclassical optimization in Paul et al. (2019).
Use the opt-in validity audit before promoting a scalar prepared derivative:
from ntx import audit_prepared_coefficient_derivative
audit = audit_prepared_coefficient_derivative(
prepared,
case,
coefficient="D11",
parameter="er_hat",
)
if not bool(audit.valid):
raise RuntimeError(audit.as_dict())
valid requires all of the following:
finite primal, adjoint, and derivative values;
full-system
||Af-s||/||s||and||A^T lambda-g||/||g||below the requested residual tolerance;prepared-adjoint, forward-mode, and centered-finite-difference gradients within the requested tolerance of direct reverse mode.
The default centered-difference step is
eps**(1/3) * max(abs(p), 1), which balances second-order truncation error
against floating-point cancellation. It is an independent diagnostic, not the
runtime derivative implementation.
The script:
python examples/derivative_path_benchmark.py
keeps the same prepared surface and coefficient derivatives, then compares:
direct reverse-mode through
solve_prepared_coefficient_vector(...),selective recomputation through
jax.checkpoint(...),the factor-reusing custom VJP through
solve_prepared_coefficient_vector_vjp(...),forward mode,
and centered finite differences.
The example is intentionally explicit. It shows how to:
prepare a reusable system with
prepare_monoenergetic_system(...),define scalar coefficient objectives,
wrap them with
jax.grad(...)andjax.vmap(...),JIT the resulting scan kernels,
compare synchronized timing, XLA temporary memory, and agreement on the same
\hat E_rscan.
The figure is written to:
docs/_static/derivative_path_benchmark.png
docs/_static/derivative_path_benchmark.pdf
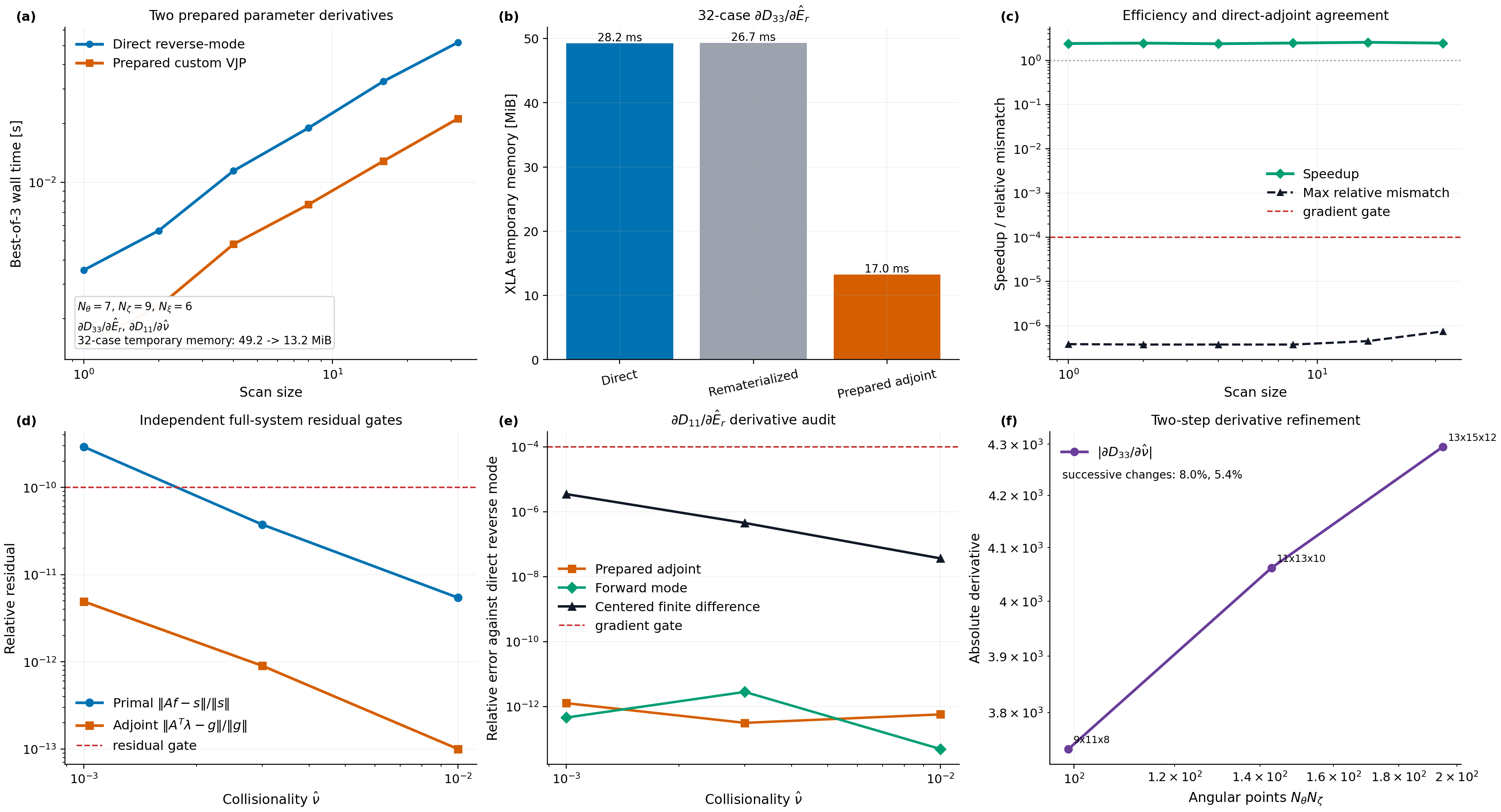
It shows:
best-of-three wall times versus scan size,
speedup and direct/prepared agreement,
independent primal and transpose residuals across collisionality,
and direct-reverse, prepared-adjoint, forward, and finite-difference agreement.
On the committed CPU artifact at scan size 32, the prepared adjoint reduces
XLA temporary memory from about 49.2 MiB to 13.2 MiB and is about 2.6x
faster than direct reverse mode. Selective recomputation does not reduce memory
for this block solve, so it is measured but not enabled. These timings are
machine-specific evidence, not release gates.
The lowest-collisionality audit point is intentionally marked invalid: its
gradient methods agree, but its independently reconstructed primal residual is
above 1e-10. This prevents accidental promotion of an unconverged derivative.
The separate non-degenerate dD33/dnu_hat resolution ladder passes all
primal/transpose and method-agreement gates and changes by 8.0% and 5.4%
over two successive 9 x 11 x 8 -> 11 x 13 x 10 -> 13 x 15 x 12
refinements. The near-zero dD11/dEr observable is not used to claim resolution
convergence.
The JSON sidecar is now checked by the physics-gate registry. The promoted
release claim is derivative agreement, not benchmark-machine timing: the maximum
prepared-vs-direct relative mismatch must remain below 1e-4; the reported
speedup is retained as performance evidence.
Geometry-Control Derivative Benchmark
The script:
python examples/geometry_control_derivative_benchmark.py
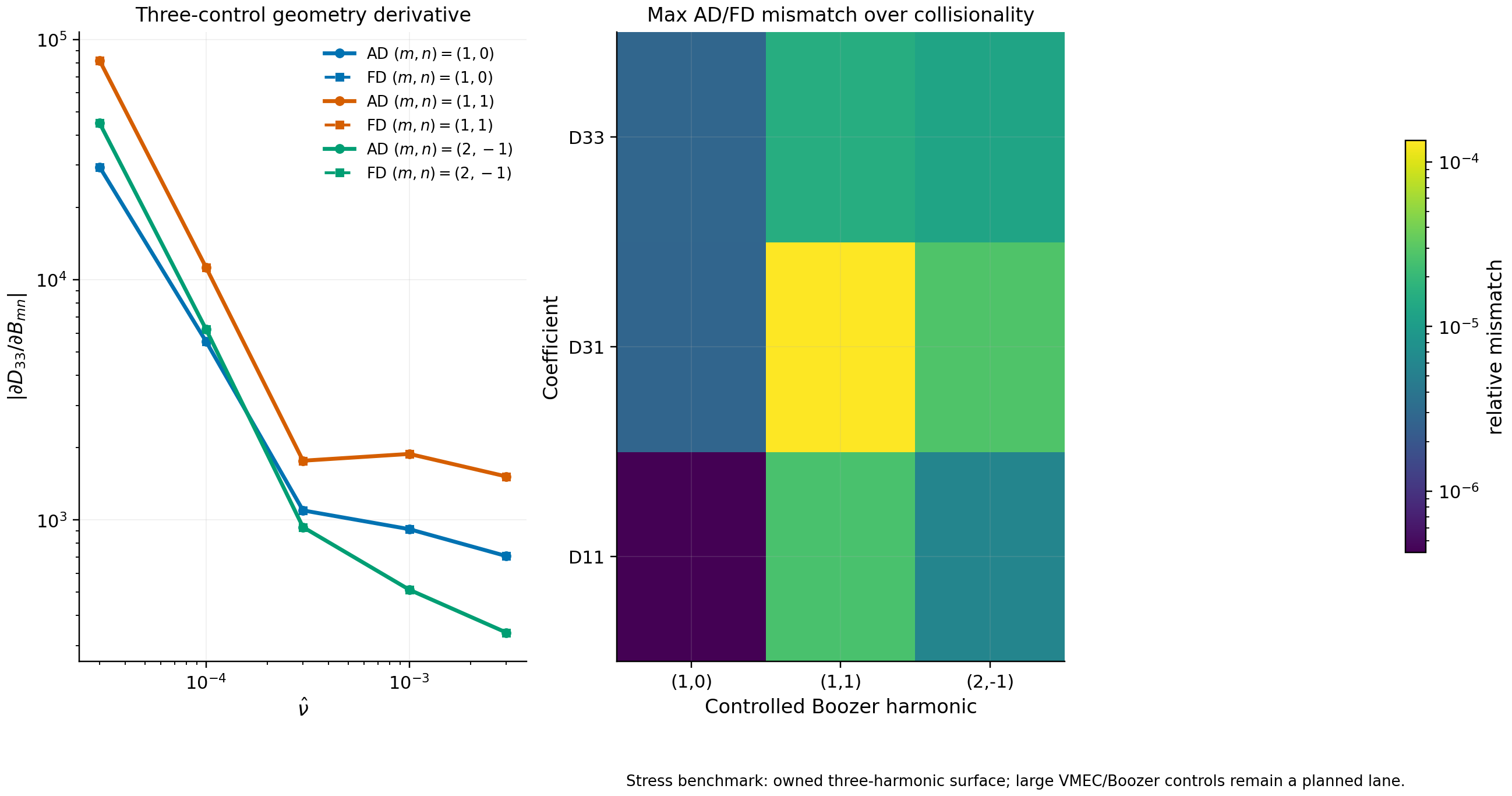
extends the derivative checks from one scalar control to three independent
Boozer-harmonic amplitudes on the owned analytic surface. It compares direct
JAX geometry-control derivatives against centered finite differences for
D11, D31, and D33 across collisionality.
The figure is written to:
docs/_static/geometry_control_derivative_benchmark.png
docs/_static/geometry_control_derivative_benchmark.pdf
docs/_static/geometry_control_derivative_benchmark.json
This is an artifact-backed autodiff stress benchmark. It is not yet a
large-geometry-control validation claim; the non-promoted follow-up is to
transfer the same audit to reusable VMEC/Boozer geometry-control families and to
compare geometry pullbacks with a prepared implicit-adjoint path once that
pullback exists.
The JSON sidecar is checked by the physics-gate registry with a current
acceptance threshold of 2e-4 maximum relative direct-AD/finite-difference
mismatch on this owned analytic surface.
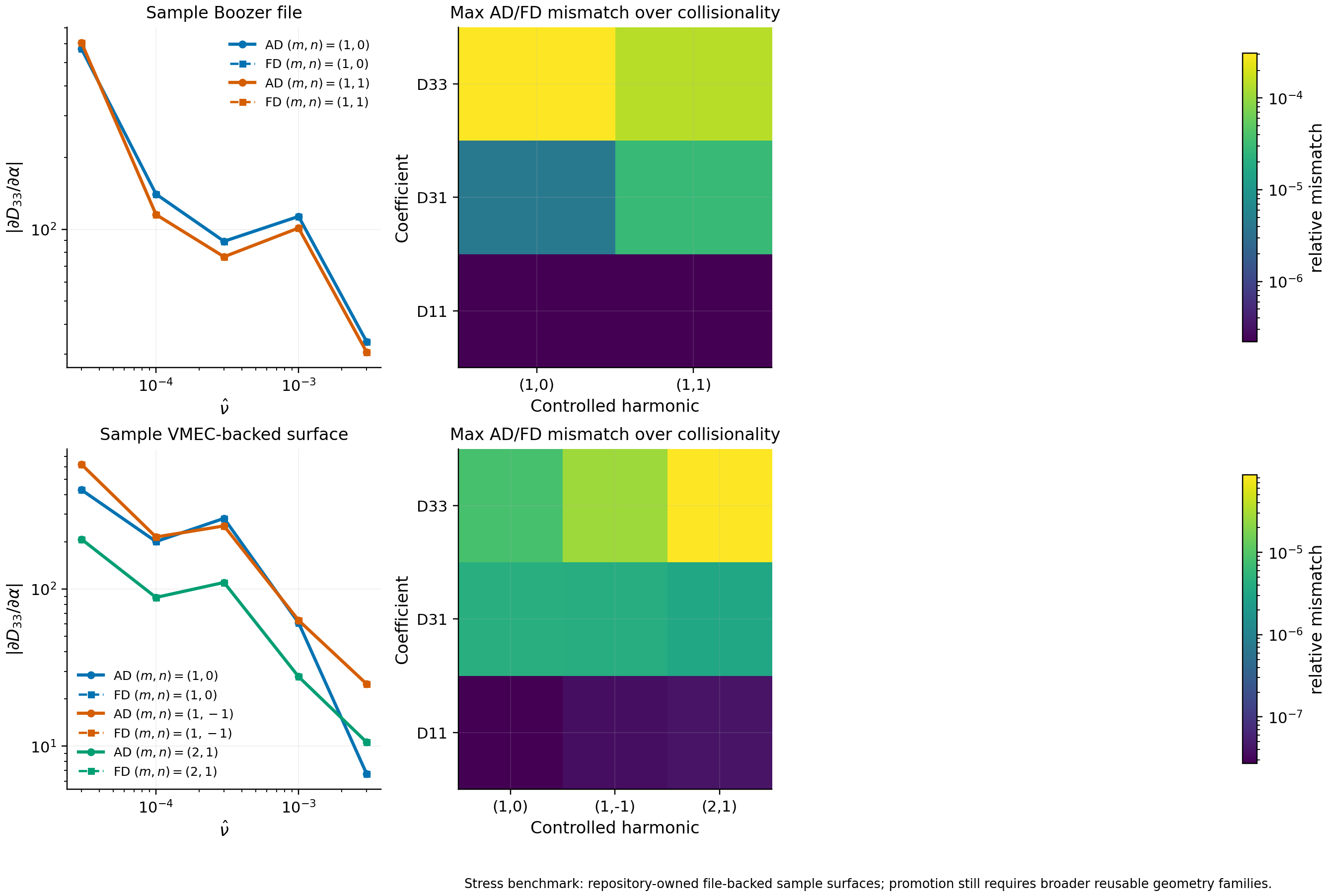
File-Backed Geometry-Control Benchmark
The script:
python examples/file_backed_geometry_control_derivative_benchmark.py
takes the next step on the geometry-control autodiff lane. Instead of the owned analytic surface, it loads two repository-owned file-backed cases:
a Boozer-file sample surface,
and a VMEC-backed sample surface.
For each case, NTX selects the dominant non-axisymmetric harmonics, perturbs
them through dimensionless scale factors, and compares direct JAX derivatives
against centered finite differences for D11, D31, and D33.
The figure is written to:
docs/_static/file_backed_geometry_control_derivative_benchmark.png
docs/_static/file_backed_geometry_control_derivative_benchmark.pdf
docs/_static/file_backed_geometry_control_derivative_benchmark.json
This closes the first file-backed slice of the geometry-control derivative
path: the derivative audit now transfers from an owned analytic surface to
repository-owned file-backed magnetic geometry. It is still a stress benchmark
rather than a promoted design claim, since the non-promoted follow-up is a
reusable family of VMEC/Boozer controls plus prepared implicit-adjoint geometry
pullbacks.
The committed JSON sidecar is now a physics gate with a 5e-4 maximum relative
direct-AD/finite-difference mismatch threshold on the file-backed samples.
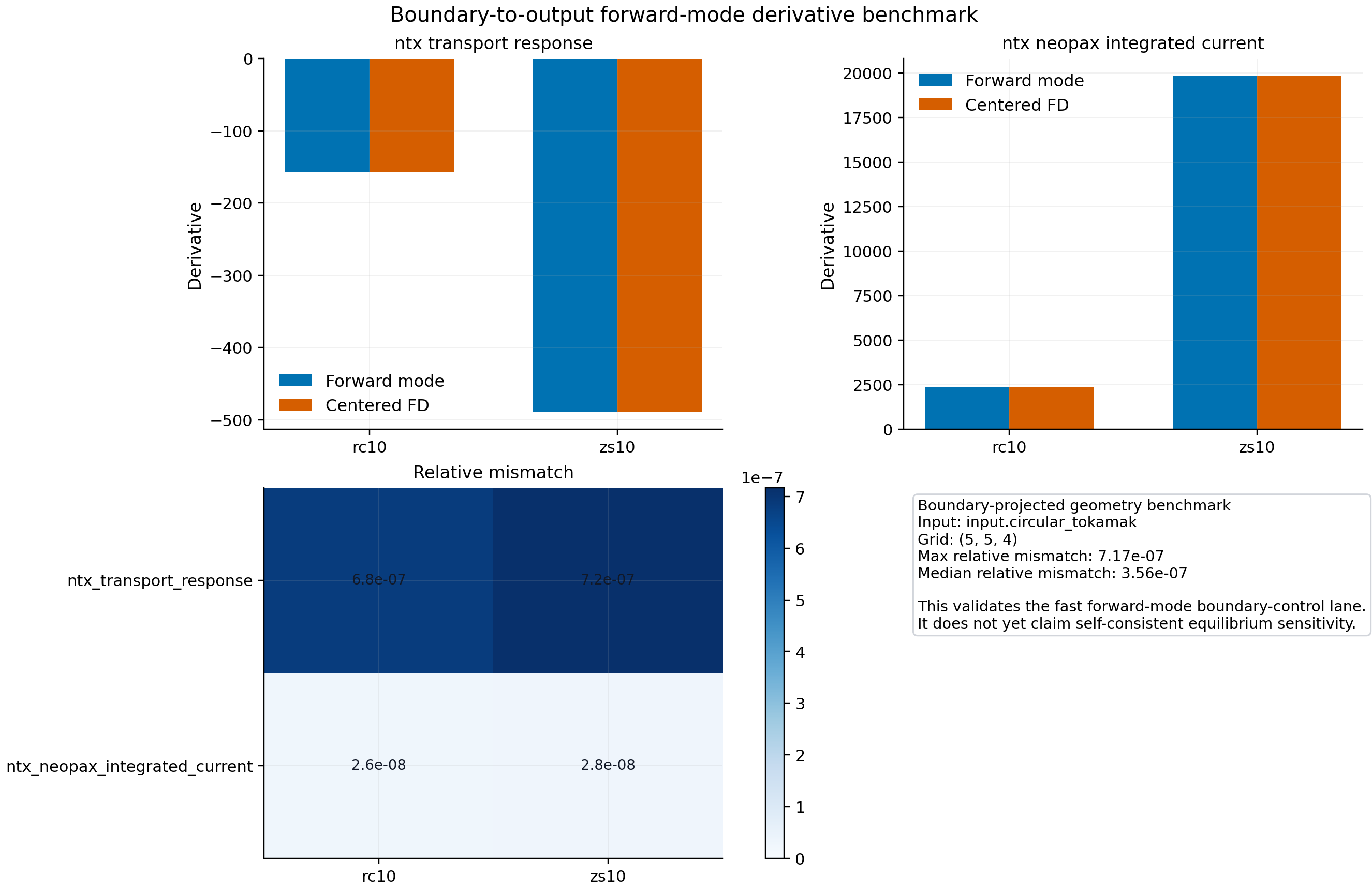
Boundary Forward-Mode Benchmark
The script:
python examples/boundary_forward_mode_current_derivative_benchmark.py
checks the next imported differentiable lane built on the upstream
vmex and booz_xform_jax packages. It treats two low-order boundary
controls from the repository-owned sample input as independent variables,
builds the boundary-projected VMEC state, transforms it to Boozer
coordinates, and then differentiates two scalar outputs with respect to those
controls:
an NTX monoenergetic transport response,
and an NTX+NEOPAX integrated-current objective.
The figure is written to:
docs/_static/boundary_forward_mode_current_derivative_benchmark.png
docs/_static/boundary_forward_mode_current_derivative_benchmark.pdf
docs/_static/boundary_forward_mode_current_derivative_benchmark.json
This is an artifact-backed stress benchmark for the boundary-to-output lane.
It is intentionally scoped to the boundary-projected geometry map, where
forward-mode autodiff matches centered finite differences on the committed
sample case. It does not yet claim a fully validated self-consistent
equilibrium sensitivity workflow for bootstrap current.
The committed JSON sidecar is checked with a 1e-5 maximum relative
forward-mode/finite-difference mismatch threshold.
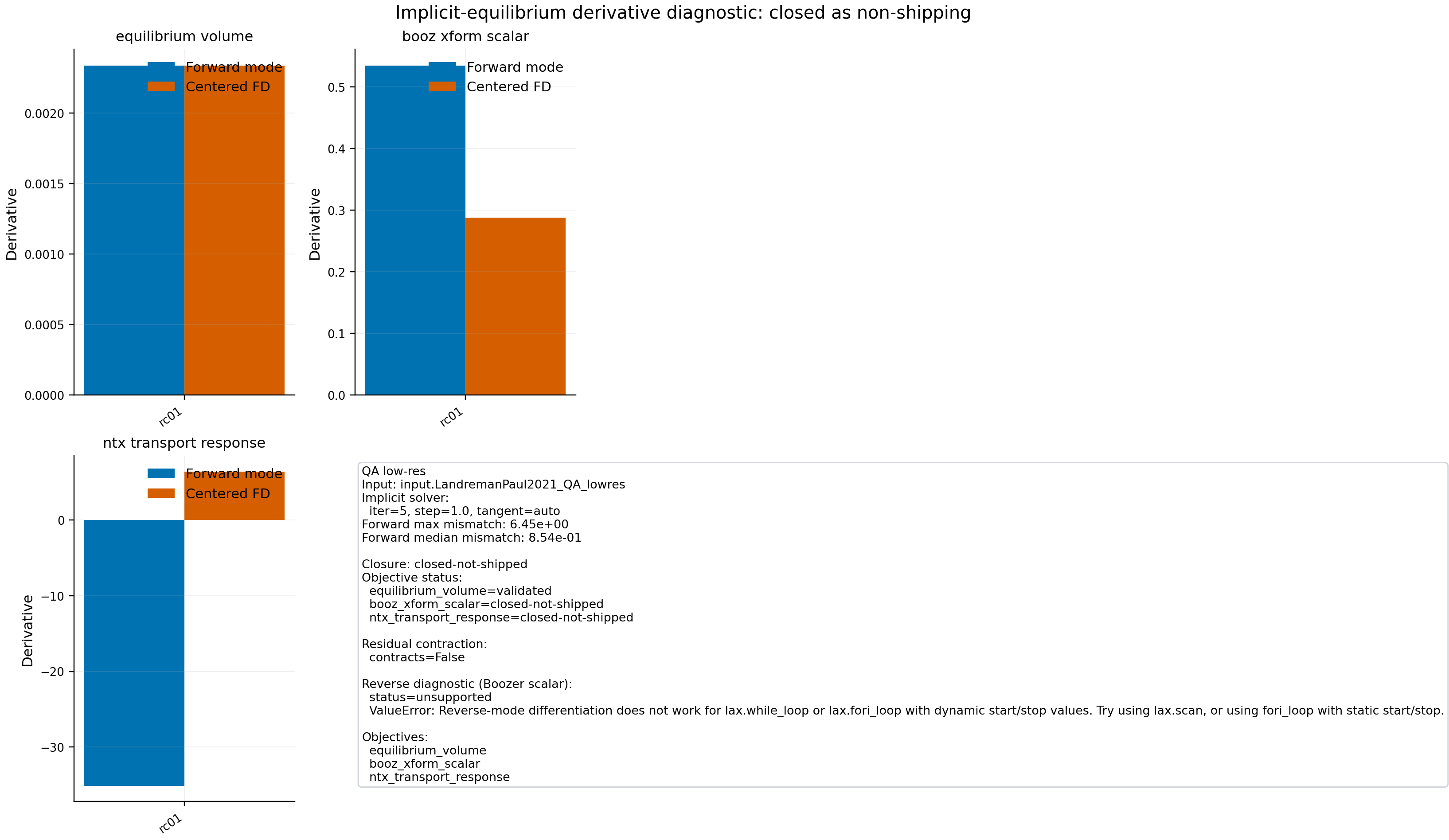
Implicit Equilibrium Forward-Mode Benchmark
The script:
python examples/implicit_equilibrium_forward_mode_derivative_benchmark.py
adds the next implicit-equilibrium diagnostic on the committed QA case. It uses
the same low-order boundary controls, but now routes them through the implicit
fixed-boundary vmex residual solve with
residual_tangent_mode="auto". The benchmark then differentiates three scalar
outputs with respect to those controls:
equilibrium volume,
a Boozer-space scalar built from the implicit equilibrium,
and an NTX monoenergetic transport response.
The figure is written to:
docs/_static/implicit_equilibrium_forward_mode_derivative_benchmark.png
docs/_static/implicit_equilibrium_forward_mode_derivative_benchmark.pdf
docs/_static/implicit_equilibrium_forward_mode_derivative_benchmark.json
This closes the implicit-equilibrium lane as a non-shipping diagnostic, not as a supported optimization path. The current JSON artifact shows a mixed result on the committed QA case:
the equilibrium-volume derivative matches centered finite differences,
the Boozer scalar fails tangent parity on the implicit lane,
the NTX transport observable fails more strongly on the same lane,
the residual history does not contract under the committed iteration ladder,
and the matching reverse-mode Boozer-scalar diagnostic is unavailable because the dynamic-loop implicit solve is not a valid promoted reverse-mode path.
The JSON sidecar is intentionally registered as a monitored diagnostic, not an acceptance gate. The supported self-consistent equilibrium derivative route is the explicit-relaxed fixed-boundary lane below. The implicit lane should only be restored after the backend residual solve contracts and Boozer/NTX centered-FD tangent parity passes.
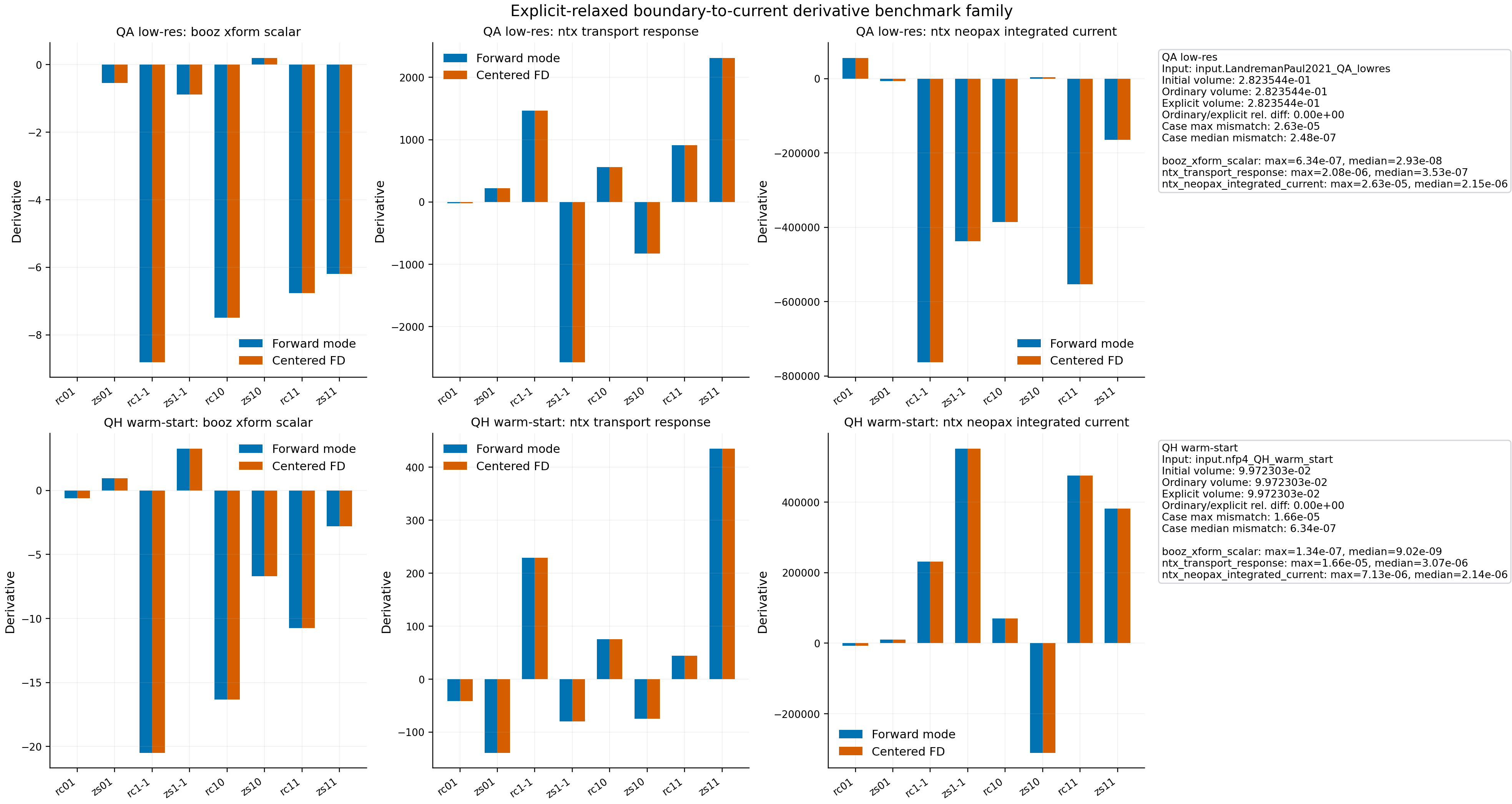
Explicit-Relaxed Equilibrium Benchmark
The script:
python examples/explicit_relaxed_boundary_current_derivative_benchmark.py
closes the next imported lane on two repository-owned non-axisymmetric cases:
a low-resolution QA family input and a lighter QH warm-start input. It uses
the same low-order boundary controls, but instead of stopping at the
boundary-projected VMEC state it runs an explicitly relaxed fixed-boundary
vmex solve in a stable forward-mode regime and then differentiates three
scalar outputs on each case:
a Boozer-space scalar built from the relaxed surface,
an NTX monoenergetic transport response,
and an
NTX+NEOPAXintegrated-current objective.
The figure is written to:
docs/_static/explicit_relaxed_boundary_current_derivative_benchmark.png
docs/_static/explicit_relaxed_boundary_current_derivative_benchmark.pdf
docs/_static/explicit_relaxed_boundary_current_derivative_benchmark.json
This is the first committed self-consistent boundary-to-current forward-mode benchmark family. The JSON artifact records that the ordinary and explicit relaxed primal volumes agree on both committed cases, so the benchmark is not just an internally consistent autodiff loop on a different equilibrium branch. The non-promoted follow-up is now narrower:
widen from the committed QA/QH cases to additional geometry families,
add integrated-current objectives on the supported explicit-relaxed lane,
and repair reverse mode on the relaxed-equilibrium lane.
The committed JSON sidecar is now checked by the physics-gate registry with a
1e-4 maximum relative forward-mode/finite-difference mismatch threshold. The
artifact also reports the ordinary-vs-explicit-relaxed volume difference, which
is currently zero on the committed cases.
At the moment, the reverse-mode implicit diagnostic remains non-shipping for a concrete reason: the matching QA Boozer-scalar probe is unavailable or guarded to zero while centered finite differences are nonzero, so it is not a promoted sensitivity workflow.
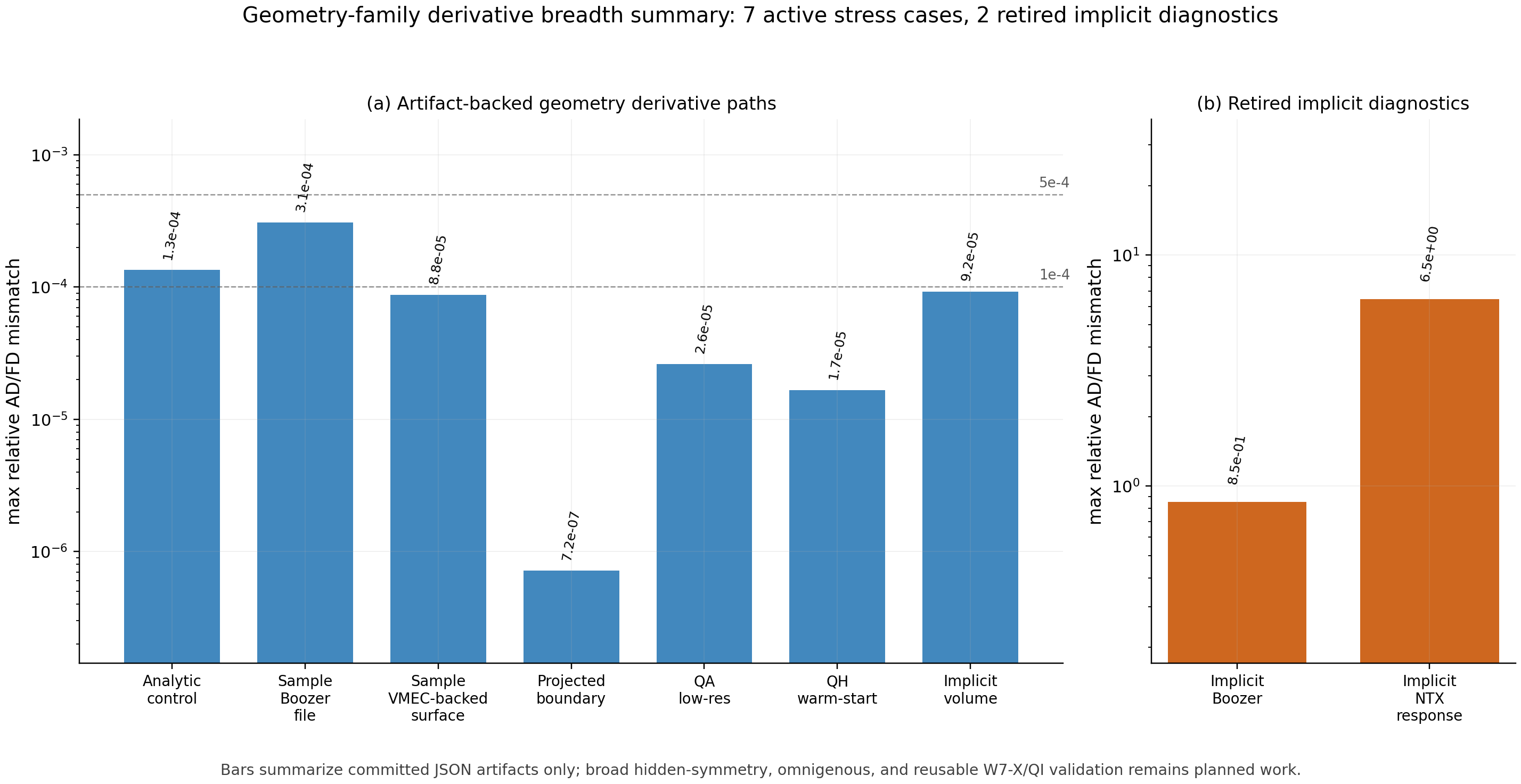
Geometry-Family Breadth Summary
The script:
python examples/geometry_family_breadth_summary.py
does not rerun expensive equilibrium solves. It reads the committed derivative artifacts and summarizes the current geometry-breadth status in one publication-ready figure:
analytic geometry-control derivatives,
file-backed Boozer and VMEC geometry-control derivatives,
boundary-projected current derivatives,
explicit-relaxed QA/QH boundary-to-current derivatives,
and the implicit-equilibrium diagnostic split into the validated volume objective and the retired non-shipping Boozer/NTX transport diagnostics.
The figure is written to:
docs/_static/geometry_family_breadth_summary.png
docs/_static/geometry_family_breadth_summary.pdf
docs/_static/geometry_family_breadth_summary.json
This closes the artifact-backed geometry-breadth summary lane, not the full
geometry-family validation lane. The remaining promotion requirements are
explicit in the JSON sidecar: broader W7-X/QI/omnigenous inputs, direct
D11/D31/D33 parity and convergence ladders, and implicit Boozer/transport
derivative parity.
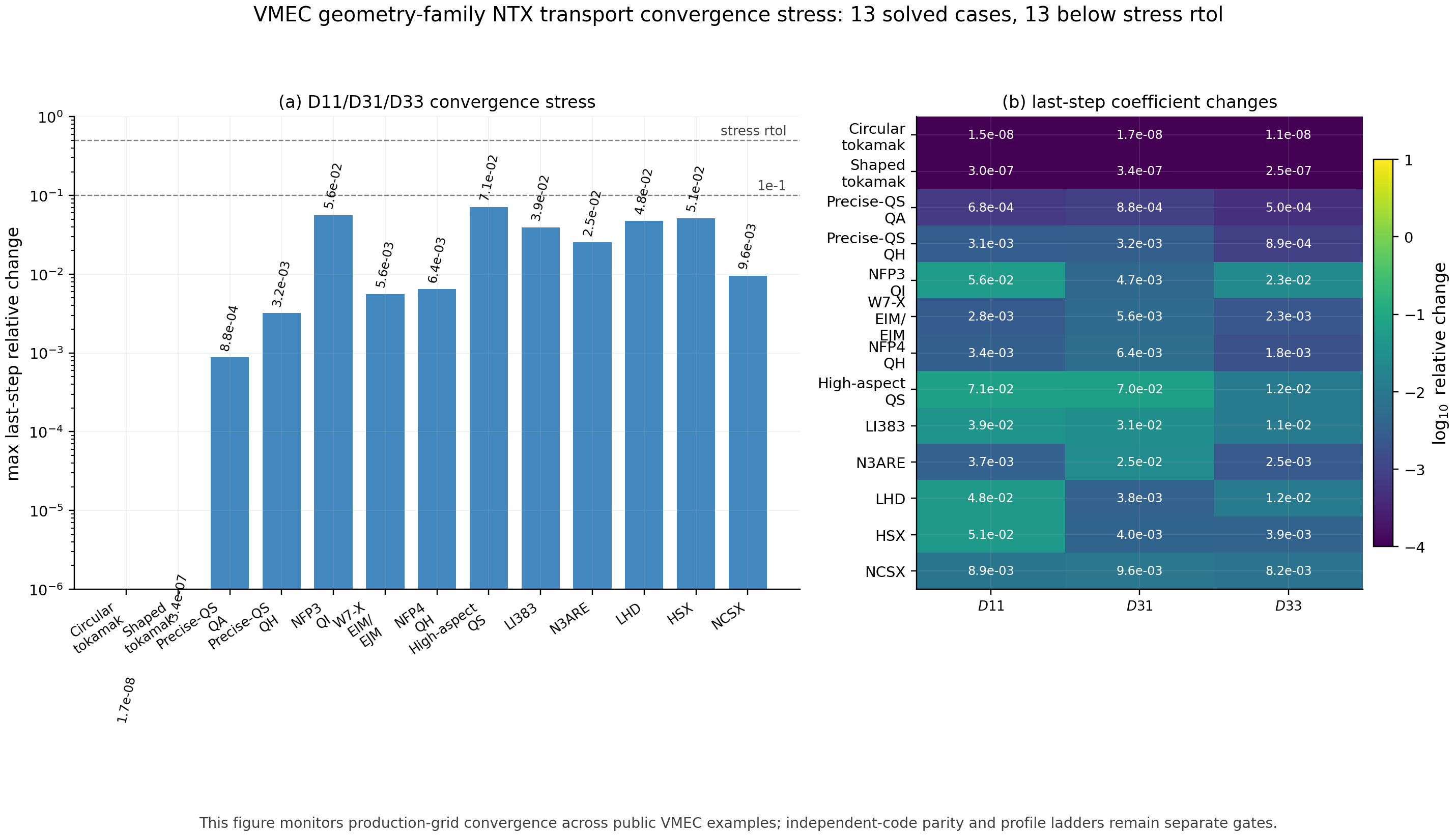
Geometry-Family Transport Convergence
The script:
python examples/geometry_family_transport_convergence.py --preset production
discovers reusable VMEC wout examples from local vmex, STELLOPT, and
SIMSOPT checkouts, loads each surface through the NTX VMEC path, and runs a
production D11/D31/D33 grid ladder. The JSON also stores D13 and the
normalized Onsager residual so coefficient convergence and reciprocity quality
are audited together. The figure and JSON sidecar are written to:
docs/_static/geometry_family_transport_convergence.png
docs/_static/geometry_family_transport_convergence.pdf
docs/_static/geometry_family_transport_convergence.json
The current artifact is a convergence stress diagnostic across the available public geometry families. It distinguishes cases that are below the tracked stress tolerance from cases that need profile-ladder or independent-reference promotion work.
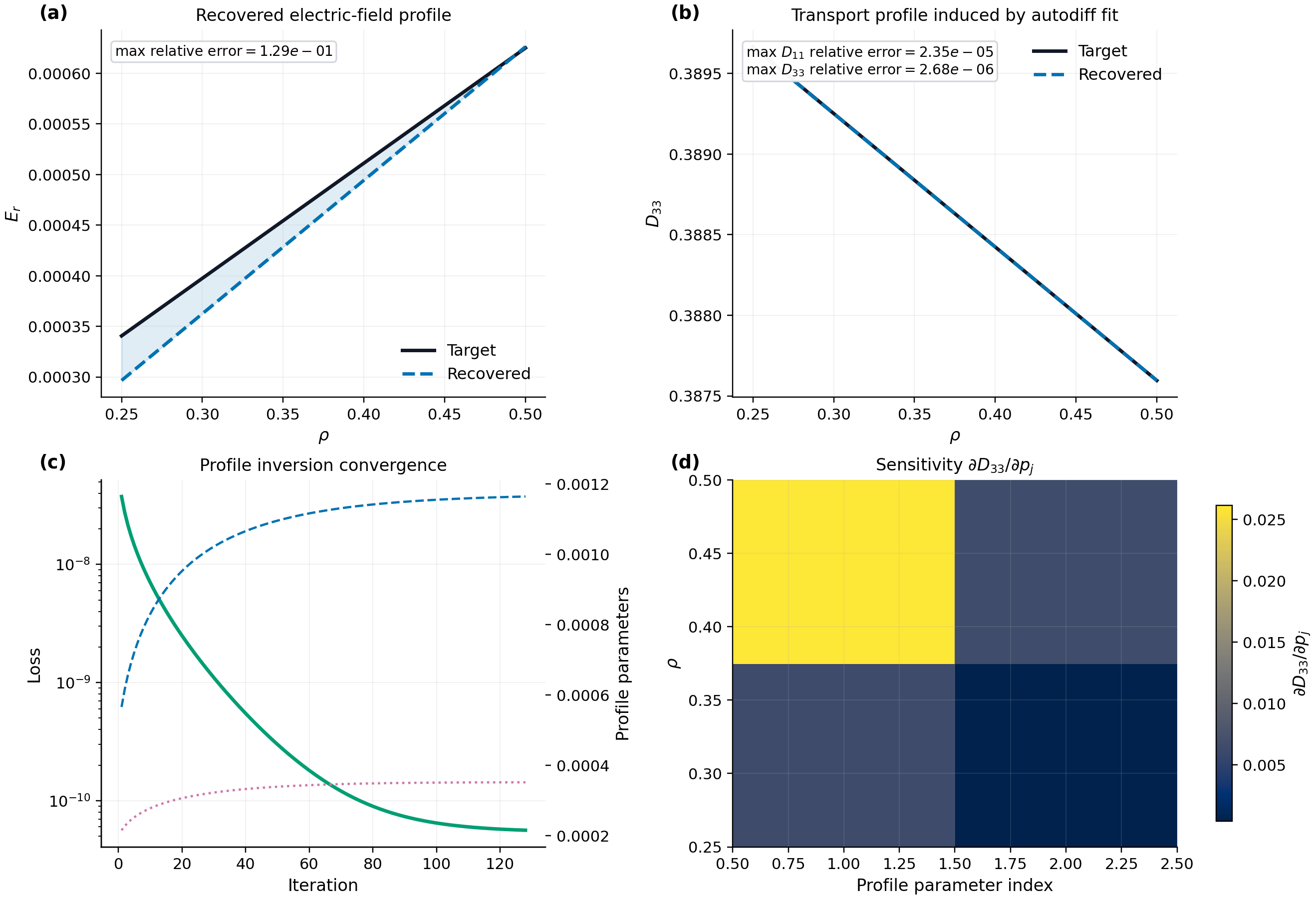
NEOPAX-Style Profile Example
The script:
python examples/neopax_autodiff_profiles.py
builds a small NTX scan, maps it into the NEOPAX monoenergetic data layout, and then solves a low-dimensional electric-field profile inversion using autodiff.
The figure is written to:
docs/_static/autodiff_neopax_profiles.png
docs/_static/autodiff_neopax_profiles.pdf
It shows:
target and recovered radial electric-field profiles
target and recovered
D33profilesobjective reduction
the local sensitivity of
D33to the profile parameters
The fast test suite now gates this interpolation layer directly:
tests/test_autodiff.py checks that D33 sensitivities through the
electric-field profile basis agree with centered finite differences on a
controlled coefficient table. This keeps the profile inverse-design and
uncertainty examples tied to a checked differentiable map instead of relying
only on end-to-end objective reduction.
Large profile bases may set jacobian_chunk_size="auto" or a positive integer
in example_neopax_profile_autodiff(...) and
example_neopax_profile_uncertainty(...). NTX then delegates bounded-memory
Jacobian assembly to SOLVAX and selects forward or reverse mode from the input
and output dimensions. The default remains native jax.jacrev because chunking
adds overhead and did not reduce memory for the small committed profile basis.
On a separate 16-control, 96-output high-mode QH performance diagnostic,
forward chunks of four reduced XLA temporary memory by about 3.6x with a
roughly 20% warm-runtime cost; chunks of one reduced memory by about 10x
but approximately doubled runtime. This is execution guidance, not a promoted
physics artifact.
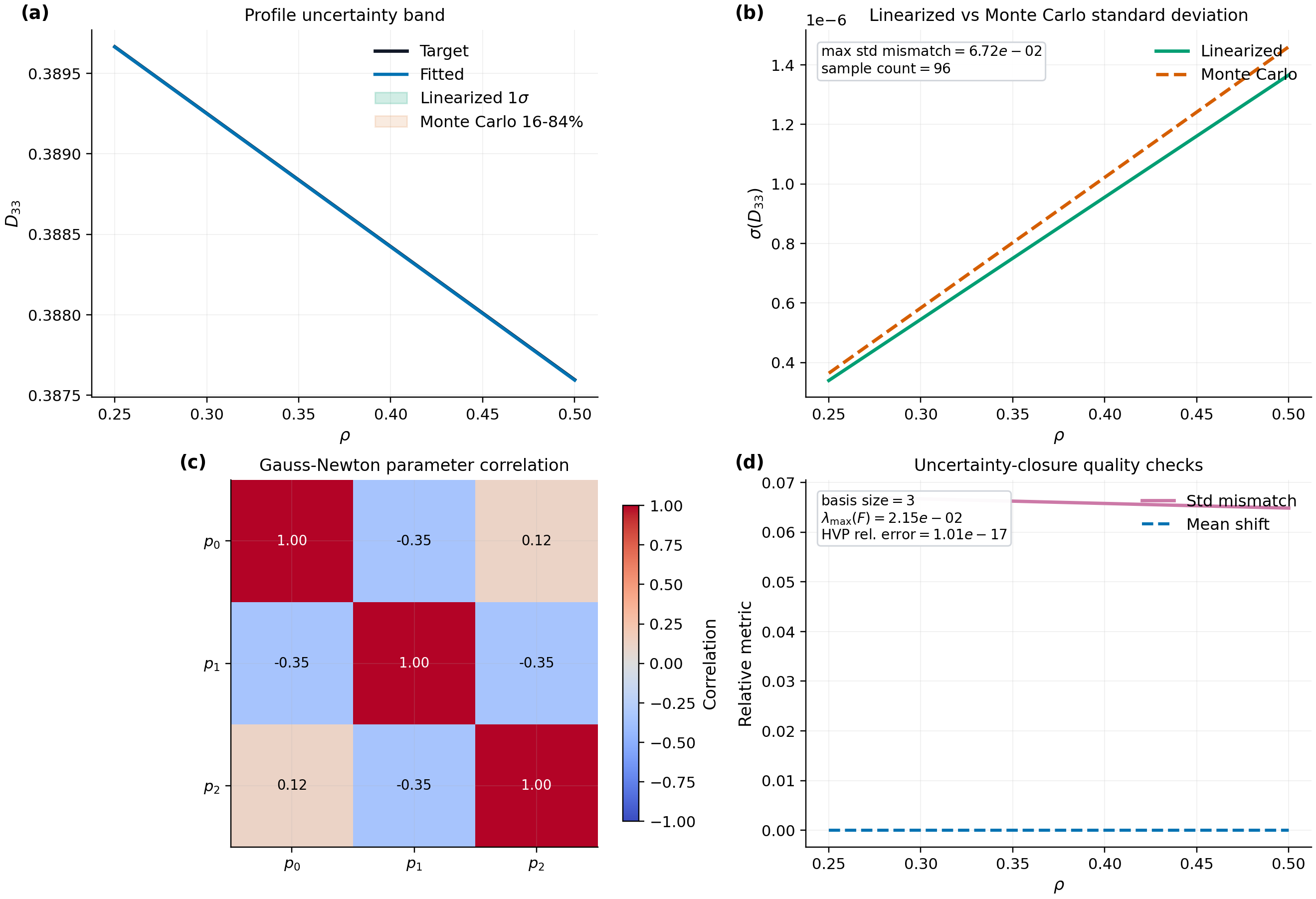
Profile Uncertainty Audit
The script:
python examples/autodiff_profile_uncertainty.py
uses the same differentiable NEOPAX-style profile fit, then compares two
uncertainty-propagation paths for the recovered D33(\rho) profile under a
small prescribed Gaussian uncertainty on the fitted radial electric-field basis
parameters:
a linearized covariance propagation through the sensitivity matrix,
and a small Monte Carlo ensemble in the fitted profile-parameter space.
The committed artifact uses a three-term odd-power radial basis by default and
also records a local Fisher/Gauss-Newton matrix plus a Hessian-vector-product
probe for the same combined D11/D33 residual used by the fit. The HVP probe
is evaluated at the recovered profile parameters, where the residual term
vanishes, so it should agree with the Fisher/Gauss-Newton product. This
provides a local mathematical gate for profile-UQ derivatives without promoting
the synthetic profile family to a broad design claim.
The figure is written to:
docs/_static/autodiff_profile_uncertainty.png
docs/_static/autodiff_profile_uncertainty.pdf
docs/_static/autodiff_profile_uncertainty.json
It shows:
the fitted transport profile with propagated uncertainty bands,
linearized versus Monte Carlo standard deviations,
the fitted profile-parameter correlation matrix,
the relative mismatch between the two uncertainty paths,
and the Fisher/HVP consistency metrics stored in the JSON artifact.
This is the current artifact-backed uncertainty-propagation benchmark for the
autodiff lane. It is intentionally synthetic and is tracked as a monitored
stress benchmark rather than a parity gate, but it exercises the same
differentiable profile map used in inverse-design and profile-control studies.
Both the profile sensitivity and Fisher/Gauss-Newton residual Jacobians honor
the optional jacobian_chunk_size setting.
Robust Bootstrap-Current Optimization
The script:
python examples/bootstrap_current_robust_optimization.py
adds a prescribed Gaussian uncertainty on the scalar geometry control used by the bootstrap-current response optimization and compares:
the deterministic objective landscape,
the robust mean-minus-risk objective,
the optimized nominal current profile,
and the uncertainty band of that profile under the prescribed control perturbation.
The figure is written to:
docs/_static/bootstrap_current_robust_optimization.png
docs/_static/bootstrap_current_robust_optimization.pdf
docs/_static/bootstrap_current_robust_optimization.json
This is a synthetic robust-design benchmark anchored to the same differentiable
current-response workflow as the main optimization example. It is currently a
tracked stress diagnostic, not a literature-grade validation claim. The JSON artifact
separates robust_objective_relative_change, which gates the optimization
workflow, from weighted_current_ratio, which is a signed current-profile
diagnostic and should not be interpreted as a standalone parity claim.
Parallel Execution
Large scans do not need to stay on one device. NTX currently exposes two parallel paths:
from ntx import solve_monoenergetic_parallel_scan
from ntx import solve_monoenergetic_multiprocess_scan
solve_monoenergetic_parallel_scan(...) keeps execution inside one Python
process and is the lightest-weight option when all visible devices are healthy.
solve_monoenergetic_multiprocess_scan(...) runs one worker process per device
and is the robust option when the platform shows process-local solver behavior.
For local profiling:
python scripts/profile_parallel_runtime.py --output-json parallel-runtime.json
python scripts/profile_multiprocess_runtime.py --backend cpu --workers 2
For multi-CPU emulation on a workstation, start the script in a fresh process with:
XLA_FLAGS=--xla_force_host_platform_device_count=4 python scripts/profile_parallel_runtime.py
On the office workstation, the single-process path exposes a cuSolver failure
mode on cuda:1, while the multiprocess pinned-device path is numerically
correct on both GPUs. For the repository smoke cases the multiprocess path is
still slower than the serial batched solve because worker startup dominates, so
it should be treated as a throughput lane for larger scans rather than a
default for small studies.